Português
Português English
EnglishArduino Mega 2560 R3: Pinout Completo y Funciones Principales
El Arduino Mega 2560 R3 es una de las placas de desarrollo más robustas y populares de la familia Arduino, diseñada para proyectos que requieren una gran cantidad de pines de entrada y salida. Su amplia cantidad de puertos digitales y analógicos la convierte en la opción ideal para aplicaciones complejas, como impresoras 3D, robots, controladores de iluminación y sistemas de automatización del hogar.
En esta guía completa, detallaremos el pinout (diagrama de pines) del Arduino Mega 2560 R3. Abordaremos las funciones de cada pin, sus características eléctricas, limitaciones y proporcionaremos una tabla de referencia rápida para ayudarte a maximizar el potencial de esta placa en tus proyectos.
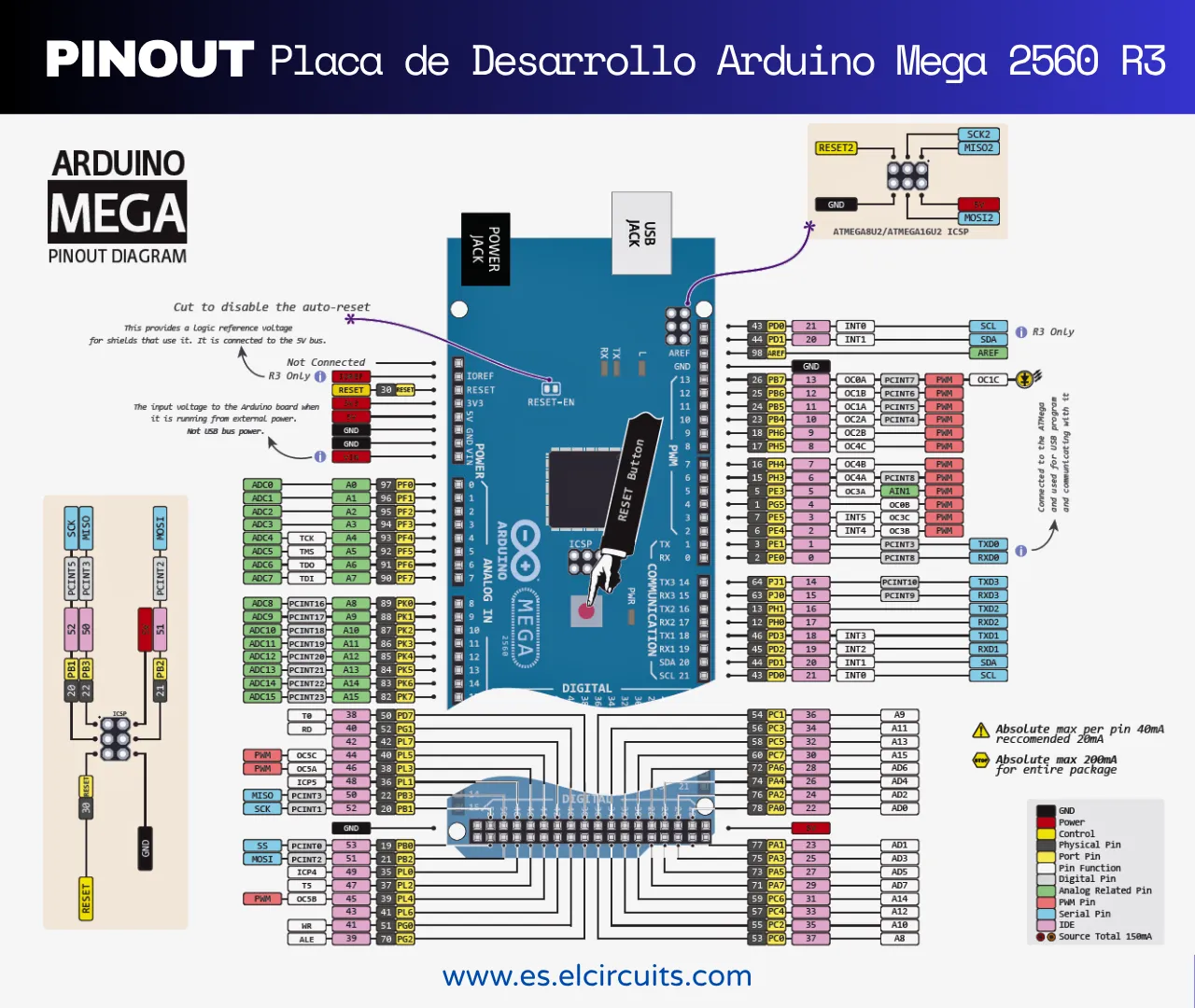
Diagrama de Pines (Pinout)
Tabla de Pines de I/O (Entrada/Salida)
| Pin en la Placa | GPIO (Chip) | Funciones Principales | Notas Críticas / Estado por Defecto |
|---|---|---|---|
D0 / RX0
|
PD0 | UART0 (Recepción) | Entra en conflicto con la comunicación serie USB. Estado por Defecto: Entrada. |
D1 / TX0
|
PD1 | UART0 (Transmisión) | Entra en conflicto con la comunicación serie USB. Estado por Defecto: Entrada. |
D2 / RX1
|
PD2 | UART1 (Recepción), Interrupción Externa 0 | Estado por Defecto: Entrada. |
D3 / TX1
|
PD3 |
UART1 (Transmisión), PWM, Interrupción Externa 1
|
Estado por Defecto: Entrada. |
D4
|
PD4 | - | Estado por Defecto: Entrada. |
D5 ~
|
PD5 |
PWM
|
Estado por Defecto: Entrada. |
D6 ~
|
PD6 |
PWM
|
Estado por Defecto: Entrada. |
D7
|
PD7 | - | Estado por Defecto: Entrada. |
D8
|
PB0 | - | Estado por Defecto: Entrada. |
D9 ~
|
PB1 |
PWM
|
Estado por Defecto: Entrada. |
D10 ~ / SS
|
PB2 |
PWM, SPI (Slave Select)
|
Estado por Defecto: Entrada. |
D11 ~ / MOSI
|
PB3 |
PWM, SPI (Master Out)
|
Estado por Defecto: Entrada. |
D12 / MISO
|
PB4 |
SPI (Master In)
|
Estado por Defecto: Entrada. |
D13 / SCK
|
PB5 |
SPI (Clock), LED L
|
Conectado al LED integrado. Estado por Defecto: Entrada. |
D14 / TX3
|
PJ1 | UART3 (Transmisión) | Estado por Defecto: Entrada. |
D15 / RX3
|
PJ0 | UART3 (Recepción) | Estado por Defecto: Entrada. |
D16 / TX2
|
PH1 | UART2 (Transmisión) | Estado por Defecto: Entrada. |
D17 / RX2
|
PH0 | UART2 (Recepción) | Estado por Defecto: Entrada. |
D18 / TX1
|
PD3 | UART1 (Transmisión) | Estado por Defecto: Entrada. |
D19 / RX1
|
PD2 | UART1 (Recepción) | Estado por Defecto: Entrada. |
D20 / SDA
|
PD1 |
I2C (Datos)
|
Estado por Defecto: Entrada. |
D21 / SCL
|
PD0 |
I2C (Reloj)
|
Estado por Defecto: Entrada. |
D22
|
PA0 | - | Estado por Defecto: Entrada. |
D23
|
PA1 | - | Estado por Defecto: Entrada. |
D24
|
PA2 | - | Estado por Defecto: Entrada. |
D25
|
PA3 | - | Estado por Defecto: Entrada. |
D26
|
PA4 | - | Estado por Defecto: Entrada. |
D27
|
PA5 | - | Estado por Defecto: Entrada. |
D28
|
PA6 | - | Estado por Defecto: Entrada. |
D29
|
PA7 | - | Estado por Defecto: Entrada. |
D30
|
PC7 | - | Estado por Defecto: Entrada. |
D31
|
PC6 | - | Estado por Defecto: Entrada. |
D32
|
PC5 | - | Estado por Defecto: Entrada. |
D33
|
PC4 | - | Estado por Defecto: Entrada. |
D34
|
PC3 | - | Estado por Defecto: Entrada. |
D35
|
PC2 | - | Estado por Defecto: Entrada. |
D36
|
PC1 | - | Estado por Defecto: Entrada. |
D37
|
PC0 | - | Estado por Defecto: Entrada. |
D38
|
PD7 | - | Estado por Defecto: Entrada. |
D39
|
PG2 | - | Estado por Defecto: Entrada. |
D40
|
PG1 | - | Estado por Defecto: Entrada. |
D41
|
PG0 | - | Estado por Defecto: Entrada. |
D42
|
PL7 | - | Estado por Defecto: Entrada. |
D43
|
PL6 | - | Estado por Defecto: Entrada. |
D44
|
PL5 | - | Estado por Defecto: Entrada. |
D45
|
PL4 | - | Estado por Defecto: Entrada. |
D46
|
PL3 | - | Estado por Defecto: Entrada. |
D47
|
PL2 | - | Estado por Defecto: Entrada. |
D48
|
PL1 | - | Estado por Defecto: Entrada. |
D49
|
PL0 | - | Estado por Defecto: Entrada. |
D50 / MISO
|
PB3 |
SPI (Master In)
|
Estado por Defecto: Entrada. |
D51 / MOSI
|
PB2 |
SPI (Master Out)
|
Estado por Defecto: Entrada. |
D52 / SCK
|
PB1 |
SPI (Reloj)
|
Estado por Defecto: Entrada. |
D53 / SS
|
PB0 |
SPI (Slave Select)
|
Estado por Defecto: Entrada. |
A0
|
PF0 | Entrada Analógica |
También se puede usar como pin digital D54. Estado por Defecto: Entrada.
|
A1
|
PF1 | Entrada Analógica |
También se puede usar como pin digital D55. Estado por Defecto: Entrada.
|
A2
|
PF2 | Entrada Analógica |
También se puede usar como pin digital D56. Estado por Defecto: Entrada.
|
A3
|
PF3 | Entrada Analógica |
También se puede usar como pin digital D57. Estado por Defecto: Entrada.
|
A4
|
PF4 | Entrada Analógica |
También se puede usar como pin digital D58. Estado por Defecto: Entrada.
|
A5
|
PF5 | Entrada Analógica |
También se puede usar como pin digital D59. Estado por Defecto: Entrada.
|
A6
|
PF6 | Entrada Analógica |
También se puede usar como pin digital D60. Estado por Defecto: Entrada.
|
A7
|
PF7 | Entrada Analógica |
También se puede usar como pin digital D61. Estado por Defecto: Entrada.
|
A8
|
PK0 | Entrada Analógica |
También se puede usar como pin digital D62. Estado por Defecto: Entrada.
|
A9
|
PK1 | Entrada Analógica |
También se puede usar como pin digital D63. Estado por Defecto: Entrada.
|
A10
|
PK2 | Entrada Analógica |
También se puede usar como pin digital D64. Estado por Defecto: Entrada.
|
A11
|
PK3 | Entrada Analógica |
También se puede usar como pin digital D65. Estado por Defecto: Entrada.
|
A12
|
PK4 | Entrada Analógica |
También se puede usar como pin digital D66. Estado por Defecto: Entrada.
|
A13
|
PK5 | Entrada Analógica |
También se puede usar como pin digital D67. Estado por Defecto: Entrada.
|
A14
|
PK6 | Entrada Analógica |
También se puede usar como pin digital D68. Estado por Defecto: Entrada.
|
A15
|
PK7 | Entrada Analógica |
También se puede usar como pin digital D69. Estado por Defecto: Entrada.
|
Tabla de Pines de Alimentación y Control
| Pin en la Placa | Nombre | Función | Descripción Técnica |
|---|---|---|---|
VIN
|
Voltaje de Entrada | Alimentación Externa |
Pin para alimentar la placa con una fuente externa (recomendado
7-12V). El voltaje es regulado a 5V por el
regulador integrado.
|
5V
|
5 Voltios | Alimentación Regulada |
Proporciona 5V regulados desde el regulador integrado o la
conexión USB. Se usa para alimentar componentes externos que operan a
5V.
|
3.3V
|
3.3 Voltios | Alimentación Regulada |
Proporciona 3.3V regulados desde un convertidor buck
integrado. Corriente máxima de 50mA.
|
GND
|
Tierra | Tierra | Pines de referencia de tierra (0V). Existen varios pines GND en la placa. |
AREF
|
Referencia Analógica | Referencia Analógica |
Pin para proporcionar un voltaje de referencia externo (entre
0V y 5V) para las entradas analógicas,
mejorando la precisión de las conversiones ADC.
|
RESET
|
Reiniciar | Reiniciar Microcontrolador |
Poner este pin en nivel bajo (LOW) reinicia el
microcontrolador ATmega2560. Generalmente usado con un botón de reset
externo.
|
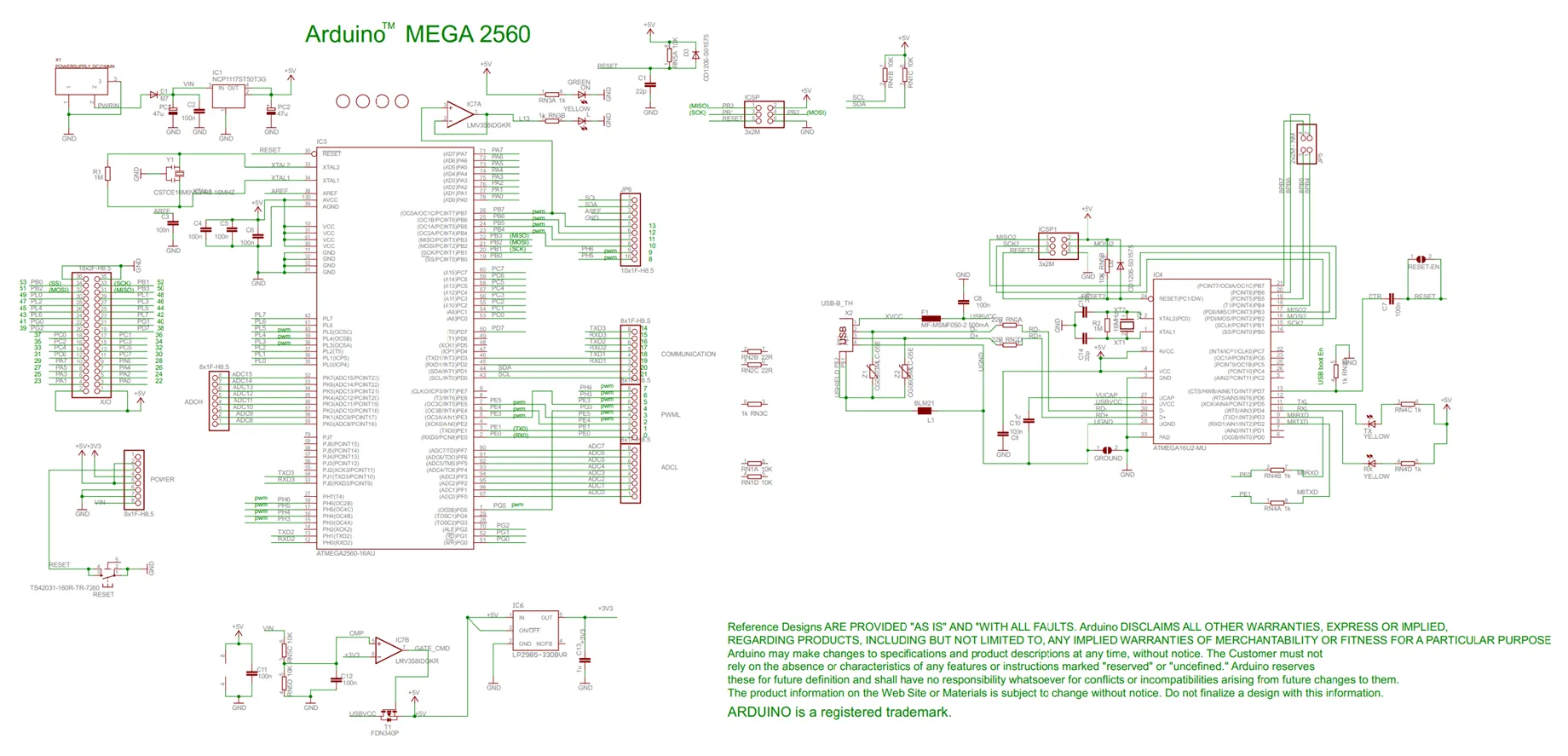
Diagrama Esquemático
El diagrama esquemático del Arduino Mega 2560 R3 proporciona una vista detallada de las conexiones eléctricas entre los componentes de la placa. Es esencial para entender cómo se distribuye la energía, cómo los periféricos se conectan al microcontrolador y cómo se implementa la comunicación USB. Analizar el esquemático es fundamental para la depuración avanzada y para proyectos que modifican o interactúan con los circuitos de bajo nivel de la placa.
🔗 Contenido Relacionado que Puede Interesarte!
Si te gustó este proyecto, también podrías interesarte por estos otros artículos:
- Arduino: ¿Qué Es, Cómo Funciona y Por Qué Deberías Empezar a Usarlo!
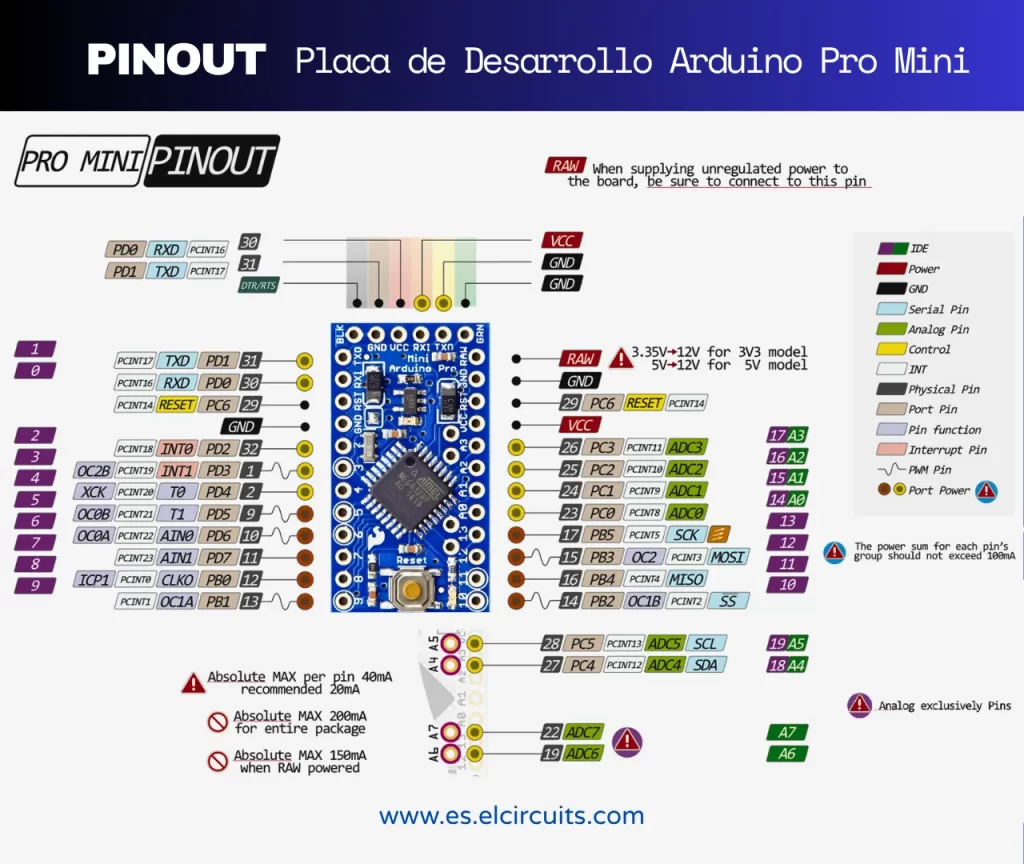
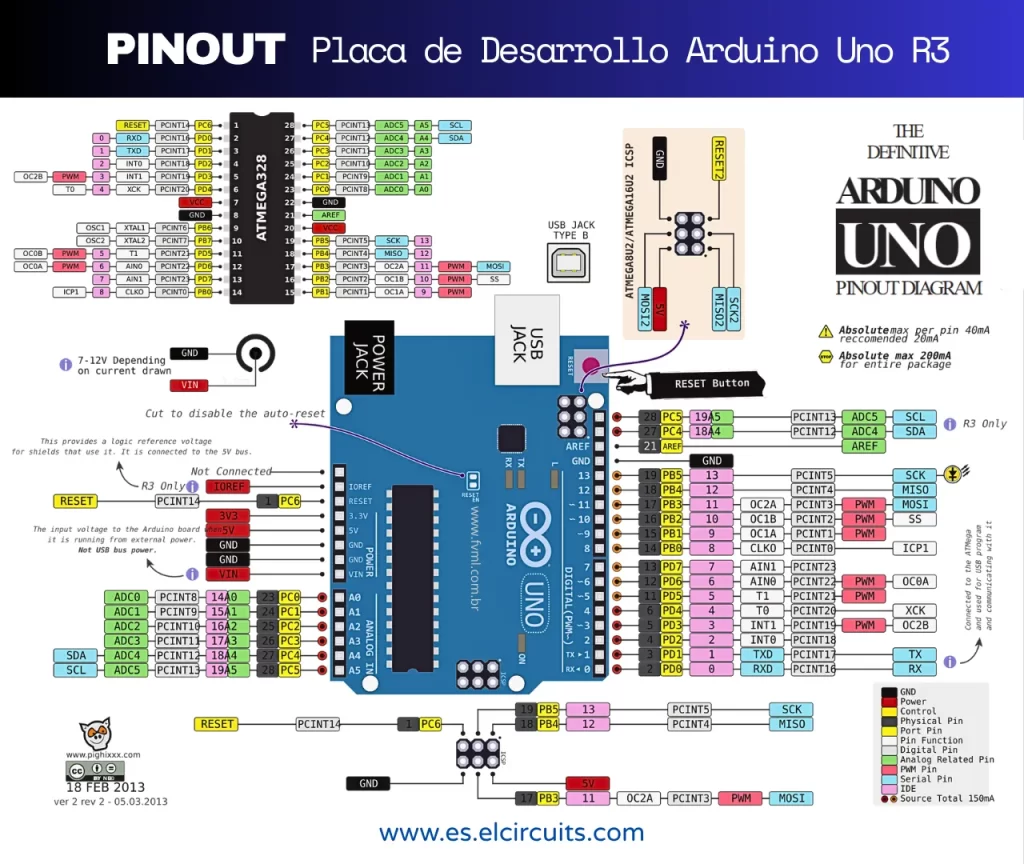
- Arduino UNO R3: Conexiones y Características Principales
Resumen de Características Eléctricas y Limitaciones
- Microcontrolador Principal: ATmega2560, un chip de 8 bits con arquitectura AVR, ofreciendo 256 KB de memoria Flash, 8 KB de SRAM y 4 KB de EEPROM.
-
Voltaje de Operación: La placa opera a
5V, sin embargo, el microcontrolador ATmega2560 puede funcionar con un rango de voltaje de2.7Va5.5V. -
Alimentación (VIN): El voltaje de entrada recomendado para el
pin
VINes de7Va12V. El rango absoluto máximo es de6Va20V. Voltajes superiores a12Vpueden sobrecalentar el regulador de voltaje. -
Corriente por Pin I/O: Cada pin de I/O digital puede
proporcionar o recibir un máximo de
20mAde corriente. El total de corriente para todos los pines de I/O no debe exceder200mA. -
Pines I/O y PWM: Posee 54 pines de I/O digitales, de los
cuales 15 pueden ser usados como salidas
PWM(Modulación por Ancho de Pulso) para controlar la intensidad de LEDs, la velocidad de motores, etc. - Entradas Analógicas: Dispone de 16 entradas analógicas con una resolución de 10 bits (valores de 0 a 1023), permitiendo la lectura de sensores y otros dispositivos analógicos.
- Conversor USB-Serial: Utiliza un chip ATmega16U2 dedicado para la comunicación USB, proporcionando una conexión serie virtual estable y confiable con la computadora, sin necesidad de drivers FTDI.
- Comunicación: Incluye 4 puertos UART (serie), 1 puerto I2C y 1 puerto SPI, permitiendo la comunicación con una amplia gama de periféricos y otros microcontroladores.
Comprender el pinout del Arduino Mega 2560 R3 es el primer paso para desbloquear todo su potencial. Esta guía sirve como una referencia rápida para ayudarte a conectar tus componentes correctamente, evitar errores comunes y aprovechar al máximo los recursos de esta poderosa placa. Ya sea construyendo un robot complejo o un sistema de automatización, el conocimiento detallado de cada pin es la base para un proyecto exitoso.
🤔 Preguntas Frecuentes (FAQ)
Para asegurar que tu proyecto sea un éxito, hemos compilado algunas de las preguntas más comunes sobre el pinout del Arduino Mega 2560 R3. ¡Échales un vistazo!
1. ¿Cuál es la diferencia entre los pines VIN y 5V? 🔽
El pin VIN se usa para alimentar la placa con una fuente de
voltaje externo no regulado (recomendado entre 7V y
12V). Este voltaje pasa por un regulador integrado que lo
convierte a 5V. El pin 5V, a su vez,
proporciona este voltaje ya regulado (ya sea desde VIN o desde el puerto USB) y
puede ser usado para alimentar componentes externos que funcionan a
5V. Nunca conectes un voltaje superior a
5V directamente en el pin 5V, ya que esto podría
dañar la placa.
2. ¿Cuántos pines PWM tiene el Arduino Mega 2560 y cuáles son? 🔽
El Arduino Mega 2560 posee 15 pines que soportan salida
PWM (Modulación por Ancho de Pulso). Ellos son:
~2, ~3, ~5, ~6,
~7, ~8, ~9, ~10,
~11, ~12, ~13, ~44,
~45, ~46. El símbolo ~ al lado del
número del pin en la placa indica su capacidad de PWM.
3. ¿Puedo usar los pines analógicos (A0-A15) como pines digitales? 🔽
Sí, puedes. Los pines de entrada analógica A0 a
A15 también pueden funcionar como pines digitales. En el código
Arduino, puedes referirte a ellos usando sus nombres de pin analógico
(ej: pinMode(A0, OUTPUT)) o sus números de pin digital
equivalentes (A0 es D54, A1 es
D55, y así sucesivamente hasta A15 que es
D69).
4. ¿Qué es el pin AREF y cuándo debería usarlo? 🔽
El pin AREF (Referencia Analógica) te permite proporcionar
un voltaje de referencia externo para las conversiones analógico-digital
(ADC). Por defecto, Arduino usa 5V como referencia, lo que
significa que una lectura de 1023 corresponde a 5V. Si estás
trabajando con sensores que operan en un rango de voltaje menor
(por ejemplo, 0V a 3.3V), puedes aplicar
3.3V en el pin AREF para obtener una resolución
mayor y lecturas más precisas en ese rango. Ten cuidado de no aplicar un
voltaje superior a 5V en el pin AREF.
5. ¿Por qué los pines D0 y D1 no son recomendados para uso general? 🔽
Los pines D0 (RX) y D1 (TX) se usan para la
comunicación serie (UART0) con la computadora a través del puerto USB. Si
usas estos pines para otros fines, podrías interferir en la
capacidad de subir nuevos sketches o en la comunicación serie
con el Monitor Serie. Es mejor evitar usarlos, a menos que no
necesites la comunicación USB o estés usando los otros puertos UART
(Serial1, Serial2,
Serial3).
6. ¿Cuál es la función del chip ATmega16U2 en la placa? 🔽
El chip ATmega16U2 funciona como un conversor USB-Serie.
Gestiona la comunicación entre el puerto USB de tu computadora y el puerto
UART principal (D0/D1) del microcontrolador
principal ATmega2560. Esto permite que la placa aparezca como
un dispositivo de puerto COM virtual en la computadora, facilitando la
programación y la depuración a través del Monitor Serie, sin la necesidad
de chips FTDI externos o drivers propietarios.
✨ Nuestro Agradecimiento y Próximos Pasos
Esperamos sinceramente que esta guía haya sido útil y enriquecedora para tus proyectos. ¡Gracias por dedicar tu tiempo a este contenido!
Tu Comentario es Invaluable:
¿Tienes alguna pregunta, sugerencia o corrección? No dudes en compartirla en los comentarios a continuación. ¡Tu contribución nos ayuda a perfeccionar este contenido para toda la comunidad de ElCircuits!
Si encontraste útil esta guía, ¡comparte el conocimiento!
Saludos cordiales, El Equipo de Circuito Electrónicos ⚡